60/85/130/200/280 Прецизионный редуктор с полой поворотной платформой Сервопривод поворотного стола электрическая делительная пластина





- Вариации
- 57 шаговый двигатель с высоким крутящим моментом 3N.M 57BYGH115 корпус 115 мм плюс драйвер
- Привод + серводвигатель с фланцем 400 Вт 60 с линейным энкодером 2500
- YT280-10-130 Серво интерфейс
- Привод + серводвигатель с фланцем 100 Вт 40 с линейным энкодером 2500
- YT85-передаточное число 15 перекрестно-роликовый подшипник
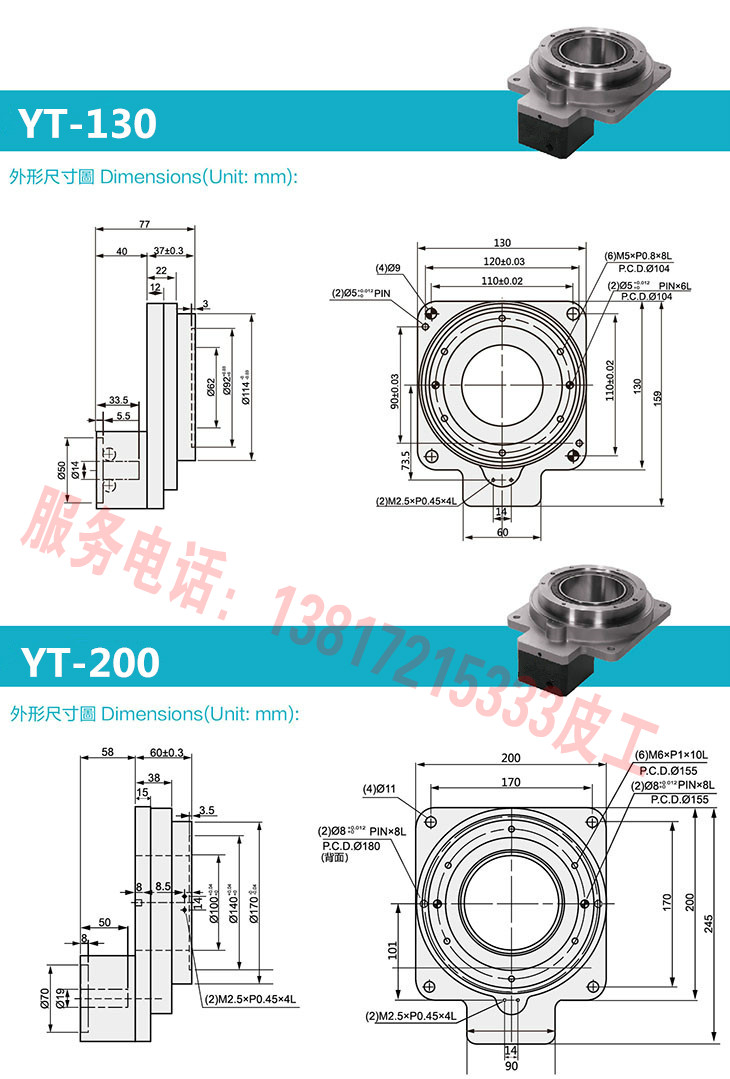
- YT130-передаточное число 18 перекрестно-роликовый подшипник
- WYT120-30
- YT200-передаточное число 18 перекрестно-роликовый подшипник
- WYT150-30
- Датчик и сенсорный лист
- YT60-передаточное число 10 перекрестно-роликовый подшипник
- YT200-передаточное отношение 10 перекрестных роликоподшипников
- YT60-передаточное число 5 скрещенных роликоподшипников
- YT85-передаточное число 10 перекрестно-роликовый подшипник
- Привод + серводвигатель с фланцем 50 Вт 40 с линейным энкодером 2500
- YT85-передаточное число 5 скрещенных роликоподшипников
- Шаговый двигатель 42H330, длина 34 мм плюс драйвер
- YT130-передаточное число 10 перекрестно-роликовый подшипник
- Если вам нужно большее передаточное число пожалуйста Консультативная служба
- Привод + серводвигатель с фланцем 200 Вт 60 с линейным энкодером 2500
- Продавец:
- 寅通旗舰
- Адрес:
- Шанхай
- Рейтинг:

- Всего отзывов:
- 0
- Положительных:
- 0


| |
| |
| |
| |
| | |||||||||||||||||||||||
| | |||||||||||||||||||||||||||||||
| |
| |
| |
| |
| ||||||||||||||||||||||||









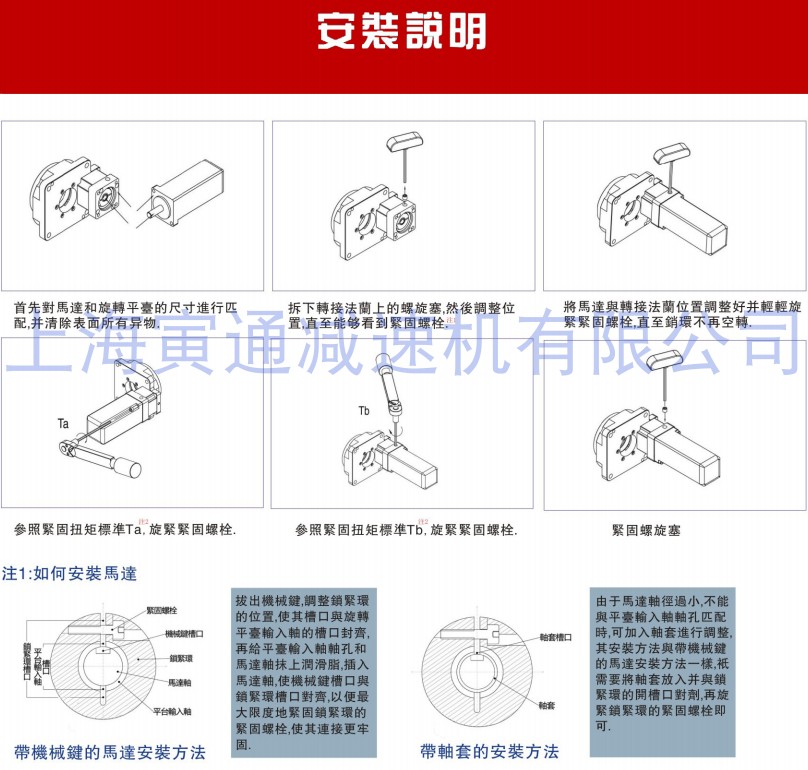
Дорогой! Для вас большая честь опекать наш магазин,Доступен в 3D-чертежах или PDF.пожалуйста Обратитесь в службу поддержки клиентов!
















К низ Параметры и чертежи для сервоинтерфейса WYT120-30-400W или 57-шагового интерфейса
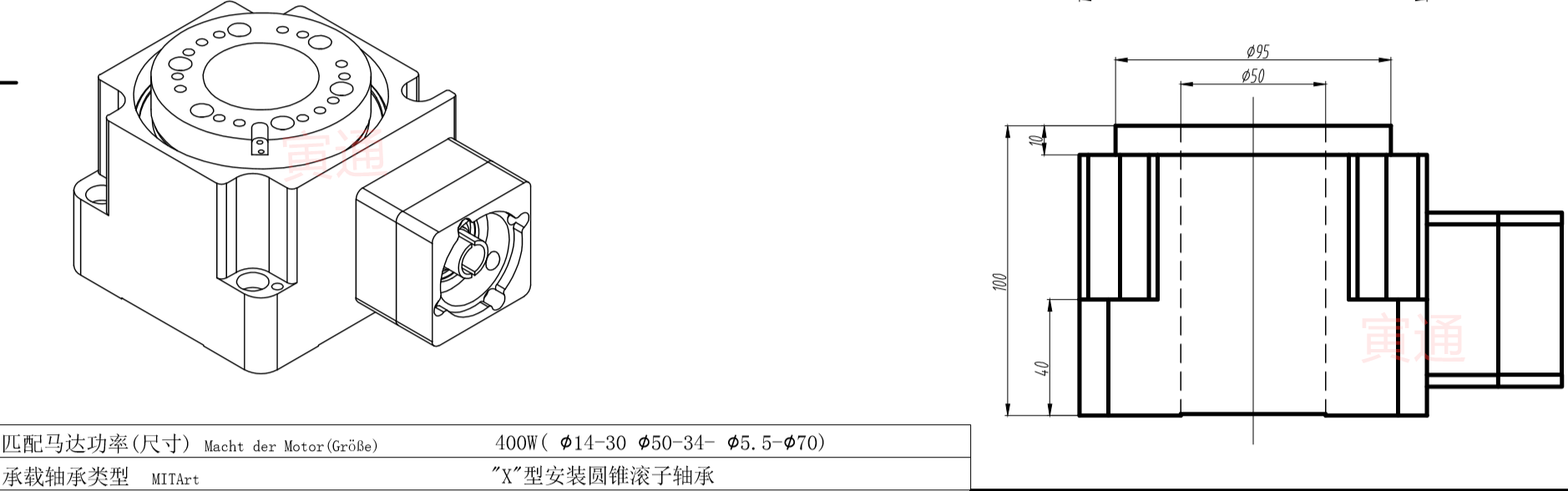
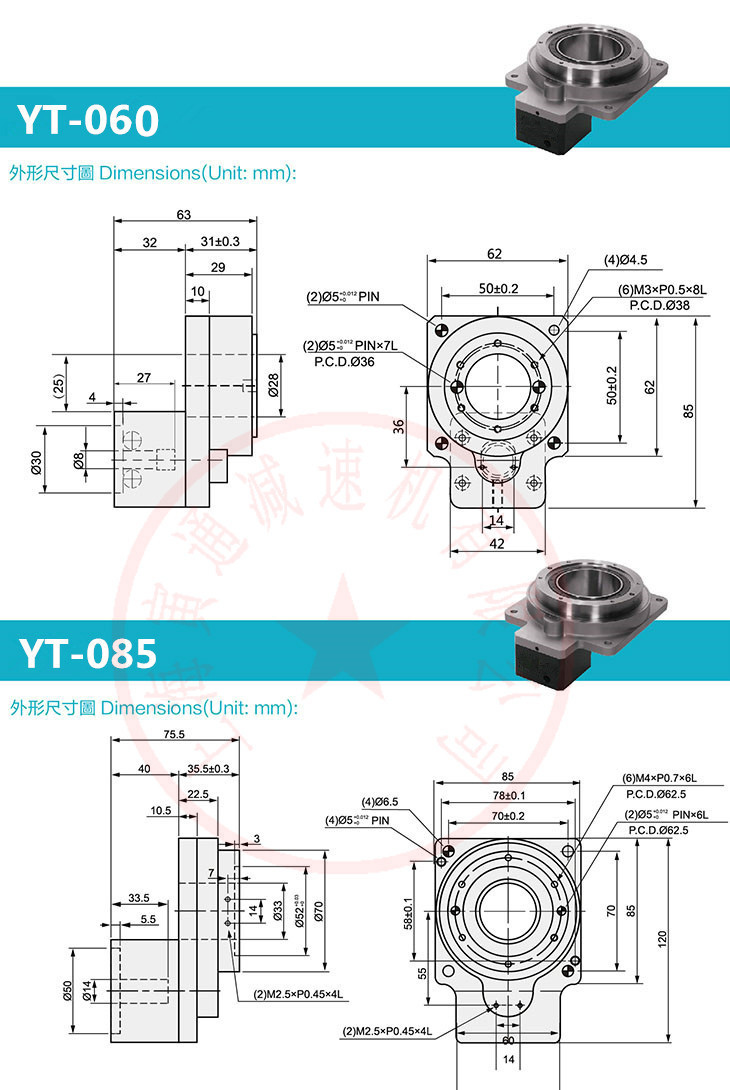
К низ Это чертеж размера сервоинтерфейса YT280-10-130.

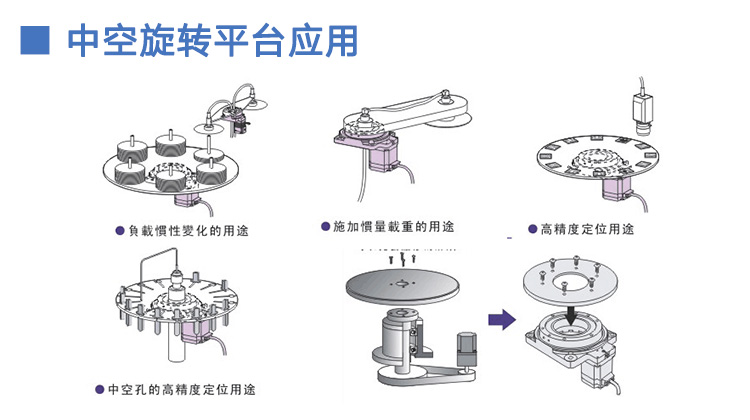





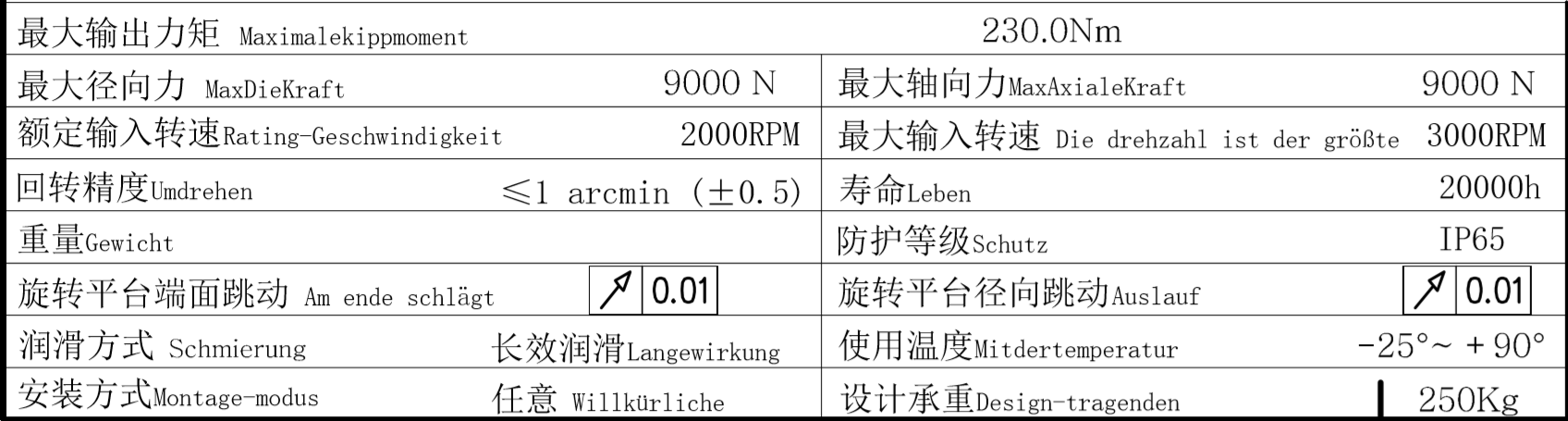
Анализ условий полой вращающейся платформы: 1. Подшипники, поддерживающие вращающуюся платформу: тип подшипника, используемый во вращающейся платформе. 2. Допустимый крутящий момент: также учитываются ускоряющий момент и колебания нагрузки. пожалуйста Здесь допустимый крутящий момент низ использовать. 3. Момент инерции: инерция ротора моторной части и инерция механизма замедления находятся на вращающейся платформе. верх Сумма преобразованных значений. 4. Разрешение: это означает количество пульсовых волн, необходимое для одного оборота вращающейся платформы. 5. Точность повторного позиционирования: числовое значение, показывающее, насколько велика ошибка, когда повторное позиционирование выполняется в одном и том же положении с одного и того же направления. 6. Ошибка прямого и обратного угла: это означает разницу в угле остановки, когда вращающаяся платформа позиционируется с прямого направления в определенное положение и когда она перемещается с обратного направления. 7. Ошибка передачи угла: это означает, что логика вращающейся платформы рассчитывается по количеству входных импульсов. верх Разница между рабочим углом и реальной работой. 8. Допустимая осевая нагрузка: указывает допустимое значение осевой нагрузки, приложенной к оси вращающейся платформы. 9. Допустимая инерционная нагрузка: когда нагрузка прикладывается к положению, эксцентричному по отношению к центру вращающейся платформы, возникает сила для наклона вращающейся платформы. Значение, рассчитанное от центра до эксцентриситета X нагрузки в это время, является допустимым значением инерционной нагрузки. 10. Параллельность вращающейся платформы: указывает оборудование относительно тормоза. сторона установка Поверхность, вращающаяся платформа установка Наклон поверхности. Рабочие характеристики полой вращающейся платформы: 1. Работа может быть напрямую заблокирована. 2. Поверхность вращающегося диска может напрямую блокировать работу, что повышает удобство загрузки заготовки. 3. Удобная проводка. Вращающаяся платформа. полая конструкция. без Либо проводка, либо трубопровод удобен 4, высокая Точность, точность позиционирования составляет менее одной минуты, точность повторного позиционирования до & amp; plusmn; 5 секунд, плавная работа, плавная и плавная работа поверхности диска и быстрое позиционирование 6, подходит для различных двигателей, полая вращающаяся платформа может использовать различные марки серводвигателя